La mayoría (¡pero no todos!) De motores y generadores reales son, por supuesto, rotativos. En esta sección voy a describir motores y generadores lineales altamente idealizados e imaginarios, solo porque la geometría es más simple que para los motores rotativos, y es más fácil explicar ciertos principios. Seguiremos adelante con los motores rotativos.
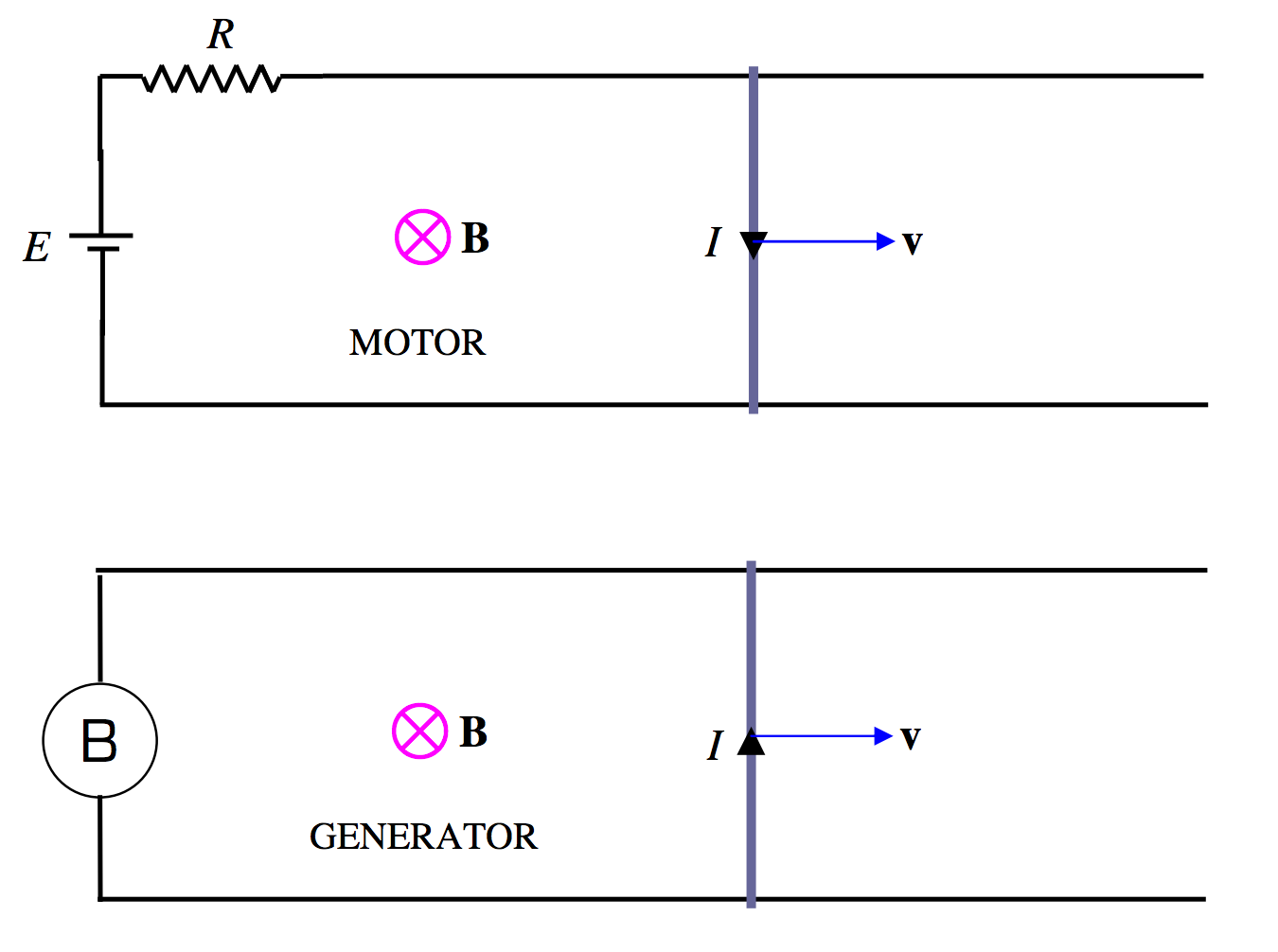
En la figura X.7 comparo un motor y un generador. En ambos casos se supone que hay un campo magnético externo (de algún imán externo) dirigido lejos del lector. Una barra de metal descansa sobre un par de rieles conductores.
( text {FIGURA X.7} )
En el motor, una batería está conectada en el circuito, haciendo que una corriente fluya en sentido horario alrededor del circuito. La interacción entre la corriente y el campo magnético externo produce una fuerza sobre la barra, moviéndola hacia la derecha.
En el generador, la varilla se mueve hacia la derecha mediante una fuerza aplicada externamente, y se induce una corriente en sentido antihorario. Si la B dentro del círculo representa una bombilla, una corriente fluirá a través de la bombilla, y la bombilla se encenderá.
Supongamos que los rieles son lisos y sin fricción, y supongamos que, en el motor, la varilla no tira de ningún peso. Es decir, suponga que no hay carga mecánica en el motor. ¿Qué tan rápido se moverá la barra? Dado que hay una fuerza que mueve la varilla hacia la derecha, ¿continuará acelerando indefinidamente hacia la derecha, sin límite para su velocidad eventual? No, esto no es lo que pasa. Cuando el interruptor se cierra por primera vez y la varilla está estacionaria, fluirá una corriente, dada por (E = IR ), donde (E ) es el EMF de la batería y (R ) es la resistencia total de el circuito. Sin embargo, cuando la varilla ha alcanzado una velocidad (v ), el área del circuito aumenta a una velocidad (av ), y un atrás EMF (que se opone al EMF de la batería) , de magnitud (avB ) se induce, por lo que la EMF neta en el circuito ahora es (E-avB ) y la corriente se reduce correspondientemente de acuerdo con
[ label {10.7.6} E-avB = IR. ]
Finalmente, la varilla alcanza una velocidad límite de (E / (aB) ), momento en el que no se extrae más corriente de la batería, y la varilla (que se desliza sobre rieles sin fricción sin carga mecánica) luego obedece la primera ley de movimiento de Newton, es decir, continuará en su estado de movimiento uniforme, porque no hay fuerzas que actúen sobre ella.
Problema 1 . Demuestre que la velocidad aumenta con el tiempo según
[ label {10.7.7} v = frac {E} {aB} left (1- text {exp} left (- frac {(aB) ^ 2t} {mR} right ) right), ]
donde (m ) es la masa de la barra.
Problema 2 . Muestre que el tiempo para que la barra alcance la mitad de su velocidad máxima es
[ label {10.7.8} t_ {1/2} = frac {mR ln 2} {(aB) ^ 2}. ]
Problema 3 . Suponga que (E = 120 text {V}, , a = 1.6 text {m}, , m = 1.92 text {kg y} R = 4 Omega ). Si la barra alcanza una velocidad de (300 text {m s} ^ {- 1} text {in} 300 text {s} ), ¿cuál es la intensidad del campo magnético?
Daré soluciones a estos problemas al final de esta sección. Hasta entonces, sin mirar.
En un motor rotativo sin fricción , la situación sería similar. Inicialmente, la corriente sería (E / R ), pero, cuando el motor gira con velocidad angular ( omega ), el EMF de retorno promedio es (2NAB omega / pi ) ecuaciones 10.5.2 y 10.6.5), y cuando esto alcanza el EMF de la batería, la bobina sin carga y sin fricción continúa girando a una velocidad angular constante, sin tomar corriente de la batería.
Ahora volvamos a nuestro motor lineal que consiste en una varilla de metal que descansa sobre dos rieles, pero esta vez supongamos que existe cierta resistencia mecánica al movimiento. Esto podría deberse a que hay fricción entre la barra y los rieles, o tal vez la barra está arrastrando un gran peso detrás de ella, o ambos. De una forma u otra, supongamos que la barra está sujeta a una fuerza constante (F ) hacia la izquierda. Como antes, la relación entre la corriente y la velocidad viene dada por la ecuación ref {10.7.6}, pero, cuando se alcanza un estado estable, la fuerza electromagnética (aIB ) que tira de la barra hacia la derecha es igual a la carga mecánica (F ) arrastrando la barra hacia la izquierda. Es decir, (E – av B = IR text {y} F = a I B ). Si eliminamos (I ) entre estas dos ecuaciones, obtenemos
[ label {10.7.9} E-avB = frac {FR} {aB}, ]
o
[ label {10.7.10} v = frac {E} {aB} – frac {R} {(a , B) ^ 2} F. ]
Esta ecuación, que relaciona la velocidad a la que el motor funciona con la carga mecánica, se llama característica de rendimiento del motor . En nuestro motor en particular, la característica de rendimiento muestra que la velocidad a la que funciona el motor disminuye de manera constante a medida que aumenta la carga, y el motor se detiene por una carga igual a (a B E / R ). (Verifique que tenga las dimensiones de la fuerza). La corriente es entonces (E / R ). Esta corriente puede ser bastante grande. Si evita físicamente que un motor real gire aplicando un par mecánico tan grande que el motor no puede moverse, fluirá una gran corriente a través de la bobina, lo suficientemente grande como para calentar y posiblemente fusionar la bobina. Escuchará un crujido agudo y verá una pequeña nube de humo.
Si multiplicamos la ecuación ref {10.7.6} por (I ), obtenemos
[ label {10.7.11} EI = aIBv + I ^ 2 R, ]
o
[ label {10.7.12} EI = Fv + I ^ 2R. ]
Esto muestra que la energía producida por la batería se debe en parte al trabajo mecánico externo, y el resto se disipa como calor en la resistencia. Restrinja el motor para que (v = 0 ), y todo de eso (E I ) entre en (I ^ 2 R ).
Si fuera a mover físicamente la varilla hacia la derecha a una velocidad mayor que la velocidad de equilibrio, el EMF posterior se vuelve más grande que el EMF de la batería, y la corriente fluye de regreso a la batería. El dispositivo es entonces un generador en lugar de un motor.
La naturaleza de la característica de rendimiento varía con los detalles del diseño del motor. Es posible que no desee un motor cuya velocidad disminuya drásticamente con la carga. Es posible que tenga que decidir de antemano qué tipo de característica de rendimiento desea que tenga el motor, dependiendo de las tareas que desea que realice, y luego debe diseñar el motor en consecuencia. Mencionaremos algunas posibilidades en la siguiente sección.
Ahora, las soluciones prometidas a los problemas.
Solución al problema 1.
Cuando la velocidad de la barra es (v ), el EMF neto en el circuito es (E – a Bv ), entonces la corriente es ((E – a Bv) / R ), y entonces la fuerza sobre la barra será (aB (E – a Bv) / R ) y la aceleración (dv / dt ) será (aB (E – a Bv) / (mR) ). La ecuación de movimiento es, por lo tanto,
[ frac {dv} {E-aBv} = frac {aB} {mR} dt. Label {10.7.13} ]
La integración, con (v = 0 ) cuando (t = 0 ), da la ecuación requerida ref {10.7.7}.
Solución al problema 2.
Simplemente ponga (v = frac {E} {2a B} ) en la ecuación ref {10.7.7} y resuelva para (t ). Verifique que la expresión tenga las dimensiones del tiempo.
Solución al problema 3.
Ponga los números dados en la ecuación ref {10.7.7} para obtener
[ label {10.7.14} B = frac {1} {4} (1-e ^ {- 100B ^ 2}) ]
y resuelve esto para (B ). (Agradable y fácil. Pero si no tiene experiencia en resolver ecuaciones como esta, el proceso Newton-Raphson se describe en el Capítulo 1 de las notas de Mecánica Celestial de esta serie. Esta ecuación sería una buena práctica). Hay dos respuestas posibles , a saber, (0,043996 ) y 0,249505 teslas. Dibujo la velocidad: gráficos de tiempo para las dos soluciones a continuación:
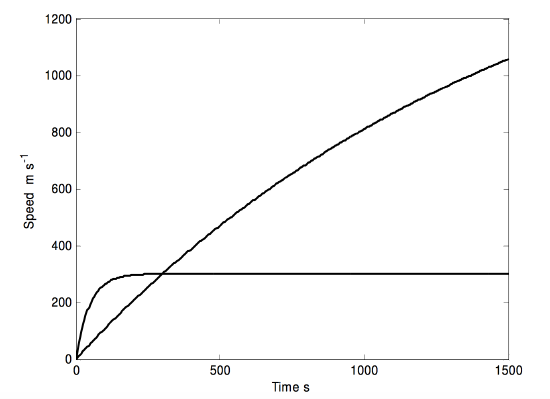
Números de interés para los dos campos:
[ nonumber begin {align} & B text {(T)} quad quad & v_ infty ( text {ms} ^ {- 1}) quad quad quad & overline t , text {s} \ nonumber \ nonumber & 0.0440 quad quad & 1704.7 quad quad quad & 1074.29 \ nonumber & 0.2495 quad quad & 300.6 quad quad quad & 33.40 \ end {align} ]